MENU
MENU Optická kontrola kvality
Optická kontrola kvality
 Robotické systémy
Robotické systémy
 Vývoj průmyslového software
Vývoj průmyslového software



Konečný klient (společnost DELONG INSTRUMENTS) potřeboval rozšířit své výrobní kapacity o další CNC stroj. Zároveň však chtěl inovovat své výrobní operace a zahájit postupný proces automatizace a robotizace. Základním požadavkem klienta byla maximálně jemná manipulace s přesným obrobkem.
Profil klienta
Společnost DELONG INSTRUMENTS je česká společnost působící od roku 1992 v oblasti elektronové optiky, mikrotechnologií a nanotechnologií. Vědcům po celém světě dodává nízkonapěťové transmisní elektronové mikroskopy LVEM a Schottkyho elektronové trysky DIGUN. Institucionální a průmysloví partneři oceňují její jedinečná zákaznická a OEM řešení a speciální komponenty na míru vyrobené od prvního návrhu až po finální zařízení.
Společnost ADATE je významný dodavatel kompletních CNC technologií pro podnikání v České a Slovenské republice.

Zadání projektu
Vzhledem k potřebě navýšení výrobních kapacit, poptal klient u společnosti ADATE dodání nového CNC stroje. Ovšem s tím, že jeho součástí má být rovnou robotické pracoviště pro jeho automatizovanou obsluhu.
Klient patří mezi českou špičku v obrábění kovů a jako velmi úspěšný inovátor v oboru hledá další možnosti, jak tuto pozici dále posilovat. I přes specifickou malosériovou výrobu se rozhodl vyzkoušet automatizaci. Proto ke společnosti ADATE putoval požadavek na robotické pracoviště.
S tímto zadáním pak společnost ADATE oslovila naši firmu KINALI, a to primárně kvůli dlouholetým zkušenostem s návrhem robotických pracovišť a vlastním vývojovým kapacitám pro kompletní dodávky HW i SW.
Klíčovým požadavkem byla co nejjemnější manipulace s obrobkem, u něhož by jakékoliv poškození dané neobratnou manipulací robotem (nebo například zanechání stop po gripperu) pro klienta znamenalo velké, a hlavně zbytečné ztráty.
Klasický podavač k CNC nebyl pro tento typ realizace vhodným řešením. Klient navíc požadoval modulární řešení v podobě kolaborativního robota, kterého může v případě potřeby snadno využít na jiném pracovišti. Díky tomu může klient dosáhnout maximálního vytížení robota a nejlepší možné návratnosti své investice.
Navrhované řešení
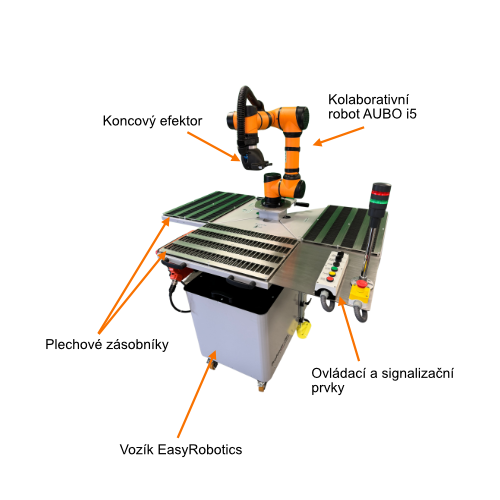
Zařízení je koncipováno jako robotické pracoviště sloužící k automatizaci obsluhy CNC soustruhu. Obsahuje tři stolky s plechovými rastry pro vkládání dílů. Tyto rastry tvoří zásobníky pro vstupní a výstupní materiál. Každý z nich obsahuje 100 pozic a využívá se pro ukládání dílů v určité fázi operace. Levý zásobník (při pohledu do CNC stroje) slouží pro uložení vstupního polotovaru, prostřední pro uložení polotovaru po první operaci a pravý pro uložení výstupních dílů.
Pracoviště principiálně funguje tak, že po zahájení programu postupně odebírá díly z jednotlivých pozic a zakládá je do soustruhu. Se soustruhem komunikuje a v momentě dokončení operace robot foukáním vzduchu očistí díl od přebytečných špon, vyndá jej z kleštin v CNC a odloží na příslušný stůl. Poté vloží další polotovar a dá CNC pokyn pro start operace.
Máte podobnou potřebu jako Delong Instruments?
Ozvěte se nám. Rádi vám navrhneme řešení na míru.
Máte podobnou potřebu jako Delong Instruments?
Ozvěte se nám. Rádi vám navrhneme řešení na míru.
Při návrhu řešení jsme zvažovali, zda využít AUBO i10 (s nosností 10 kg), nebo i5 (s nosností 5 kg). Nakonec jsme zvolili variantu i5, jelikož jeho dosah i váha dostačuje pro většinu klientem uvažovaných operací a oproti modelu i10 je levnější.
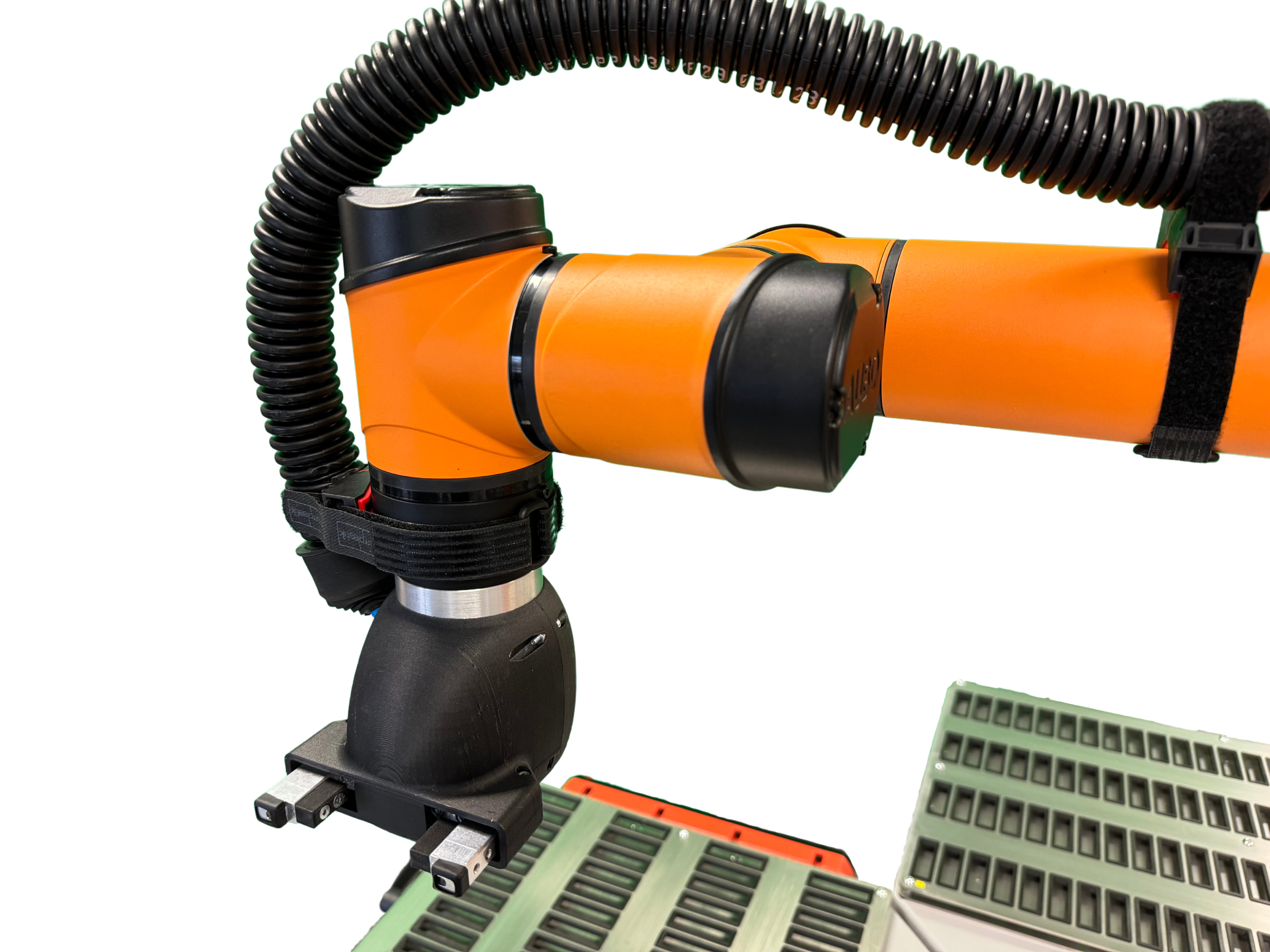
Fukar sloužící k čištění dílů, umístěný na end efektoru robota, byl navržen a vyroben na míru v KINALI (za využití vlastních 3D tiskáren).
Díky využití tří odkládacích stolků je možné díl bezobslužně obrobit z obou stran a zároveň lze za běhu doplňovat polotovar na vstupu. Tím se dá vytvořit nepřetržitý provoz.
Na realizaci zakázky jsme zvažovali dual gripper, který by mohl manipulovat se dvěma díly najednou. Nicméně se jedná o další investici. Vzhledem k tomu, že klient nevyžadoval vysokou rychlost obsluhy stroje a dual gripper by zbytečně zvyšoval náklady, jsme od této varianty upustili.

Technické parametry
| Robot | Kolaborativní robot AUBO i5 |
| Koncový nástroj |
Stavěný pro klienta na míru
|
| Robotická základna |
ProFeeder Flex od společnosti EasyRobotics
|
| Způsob ovládání pracoviště | Tlačítkový panel na míru, ovládací displej kobota (teach pendant) |
Provedení
Realizace zakázky měla celkem čtyři fáze, a to:
- designérská fáze (koncepční studie, prototyp, finální design);
- oživování (kompletace, naprogramování, otestování v prostorách KINALI vlastními QA pracovníky);
- testování u ADATE po napojení na CNC;
- finální nasazení u klienta (DELONG INSTRUMENTS).
Výsledek řešení
Pracoviště je navrženo tak, aby zvládlo CNC stroj obsluhovat po dobu celé jedné směny bez nutnosti asistence lidského operátora. Díky zásobníku na až sto kusů vstupního materiálu je i z tohoto pohledu pokryta celá směna. Stačí na jejím začátku naplnit zásobník a na konci směny vyskládat hotové obrobky. V případě potřeby lze vstupní materiál doplňovat i za běhu stroje a zajistit tak v podstatě nekonečnou smyčku běhu celé CNC linky.
Díky umístění kolaborativního robota AUBO i5 na robotickou základnu EasyRobotics, která umožňuje snadný přesun na jakékoliv místo, jsme navíc do výroby společnosti DELONG INSTRUMENTS dodali skutečně flexibilního parťáka. Toho lze jednoduše umístit k jakémukoliv stroji a během několika málo hodin pro něj v intuitivním prostředí controlleru AUBO nebo vedením robotické ruky nakonfigurovat nové trasy pohybu a úkony.
Díky této úrovni automatizace se produktivita pracoviště zvýšila o 70 %, přičemž zůstává zachována maximální flexibilita nasazení a snadná obsluha bez nutnosti rozsáhlého programování.
Závěrem
Novou výzvou pro náš vývojový tým byl návrh a výroba zařízení pro čištění obrobků od špon a jeho implementace do jednoho end efektoru s gripperem. Gripper byl navíc upraven tak, aby za žádných okolností nemohl na materiálu zanechat stopy po manipulaci.
Robotická pracoviště sloužící pro obsluhu CNC strojů patří mezi standardní řešení dodávaná společností KINALI do průmyslových provozů. Tato realizace byla atypická vývojem end efektoru na míru, jenž kombinuje gripper s fukarem pro čištění dílů pomocí vzduchu. Zároveň se jedná o ukázku úspěšné kooperace na komplexních dodávkách s dalšími špičkovými českými firmami (zde ADATE).
GALERIE PROJEKTU